Pada postingan ini admin akan melanjutkan materi tentang SISTEM KENDALI DALAM TENAGA LISTRIK. Seperti biasa sebelum kalian mempelajari materi ini admin sarankan untuk membaca terlebih dahulu postingan mimin mengenai sistem kendali pada materi sebelumnya (Bag.1 dan Bag.2.) Tetapi tidak ada masalah jika kaian memang sudah paham mengenai dasar sistem kendali sehingga bisa mempelajari materi ini langsung :).
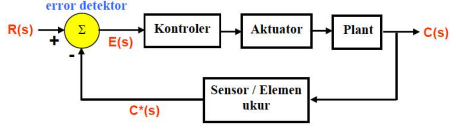
Masih ingat apa saja komponen dalam sistem kontrol? Yup..., Eror Detektor, Kontroler, Akuator, Sensor dan Tranduser.
Semua komponen dalam sistem kendali direpresentasikan dengan rangkaian diagram blok. Dalam suatu sistem yang lebih kompleks diperlukan suatu model matematis untuk merepresentasikan sebuah sistem tersebut dan menyederhanakan rangkaian dalam sebuah metode yang disebut dengan reduksi diagram blok.Dalam membuat suatu model matematika persamaan sistem fisik kita dapat menggunakan dua metode yaitu, fungsi transfer dalam domain frekuensi (transfer function in the frequency domain) dan persamaan kestabilan dalam domain waktu (state equiation in the time domain). Dalam hal ini kita sepakat bahwa langkah pertama dalam membuat pemodelan matematika sistem kendali menggunakan hukum dasar fisika. Sebagai contoh dalam rangkaian listrik kita menggunakan hukum Law dan Kirchhoff dalam menentukan hubungan antara input dan output dari suatu sistem.
Sebelum masuk terlalu jauh dalam materi model matematis sistem kendali, mari kita terlebih dahulu membahas mengenai Transformasi Laplace. Secara sederhana transformasi laplace merupakan suatu alat untuk menyederhanakan suatu persamaan difrensial dalam matematika. Transformasi laplace mengonversi persamaan diffrensial (dalam domain waktu {t} ) kedalam persamaan aljabar dalam domain s. Secara matematis transformasi laplace didefinisikan sebagai berikut :

Transformasi Laplace dapat digunakan jika f(t) bernilai real dan kontinu sepanjang interval waktu. dengan f(t) = 0 untuk t<0. VAriabel s merupakan variabel komplek dengan nilai

Invers dari transformas laplace adalah sebagai berikut :

dimana,


Fungsi u(t) erupakan fungsi step yang berarti u(t) akan bernilai 0 jika nilai t kurang dari 0 dan u(t) bernilai 1 jika t lebih dari 1.
Untuk lebih mudah mengerti mengenai transformasi laplace mari kita bahas mengenai konsep dasar. Berdasarkan notasi dasar pada transformasi laplace yang sudah dijelaskan diatas, misalkan kita sepakat bahwa f(t) = k. Jika dituliskan menjadi sebagai berikut :
Misalkan f(t) = k ; dimana k adalah konstanata {..,-1,0,1,2,..}
Maka :

Kita sepakat bahwa : -s(∞)= -∞ dan -s(0)=0

Kita positifkan e(-∞)


Maka :

Jadi dapat disimpulkan Transformasi Laplace dari eat adalah 1⁄(s-a).Jadi misalkan eat = e-2t maka Transformasi Laplacenya dalah 1/(s+2).
| F(t) | F(s) |
| δ(t) | 1 |
| δ(t) | 1 |
| u(t) | 1/s |
| tu(t) | 1/s2 |
| tnu(t) | n!/sn+1 |
| e-atu(t) | 1/s+a |
| Sinωt u(t) | ω/(s2+ ω2) |
| Cosωt u(t) | s/(s2+ ω2) |